Hexapod
Hexapod
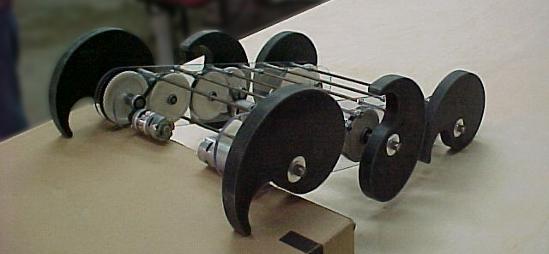
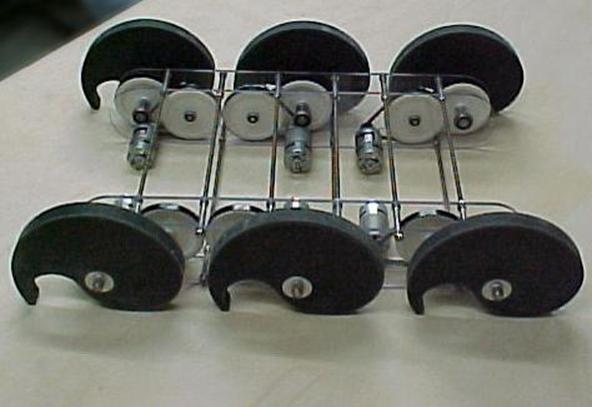
A Hexapod is defined by robotics as a chassis or stationary platform with 6 axis of travel, movement or what's called freedom. Most hobbyist hexapod robots one might see or buy might have six legs and walk like an insect. Everybody has seen six wheels and tank tracks work time and time again. So the question is there some better way to traverse the land or even buildings and urban areas. Convention tells us inhabitants of this earth use legs or wings of some shape or form. In place of arms or legs we have our patented half-wheel that rolls at high speed like a full set of wheels, it climbs objects or stairs and even has the ability to jump. The platform rolls smoothly by default and keeps 3 round portions of the wheels on the ground at all times in this mode. If terrain conditions or obstacles get to difficult it has the ability to change its drive personality in order accomplish a task.
This vehicle in having no front, rear top or bottom designation can be flipped or dropped and still operate as normal. This requires many calculations and adjustments of wheel position with altering speeds between the wheels just to turn without losing the rhythm. A drive gait is chosen to suit the terrain, obstacle or operation. In the aggressive climbing mode it churns at low rpm up, down, or through just about anything. A variant of this is used like paddles for swimming. With this wheel design having not seen water to date no performance data is available yet could bode well. Traction is the name of the game with sticky 9 inch diameter polyurethane yin-yang style wheels.
Many other half-wheel designs are possible and have been tested

Technical Specifications
- 22" long x 18" wide
- 9" diameter x 1" wide custom polyurethane wheels
- 36:1 quiet dual belt drive reduction
- x6 390 watt brushed motors
- x6 individually controlled reversing speed controls
- Absolute wheel position encoders
- A rugged polycarbonate body and a version with a flexible "live" center
- Top speed: 20 mph